怎么使用Python点云生成3D网格
时间:2023-05-12 22:56
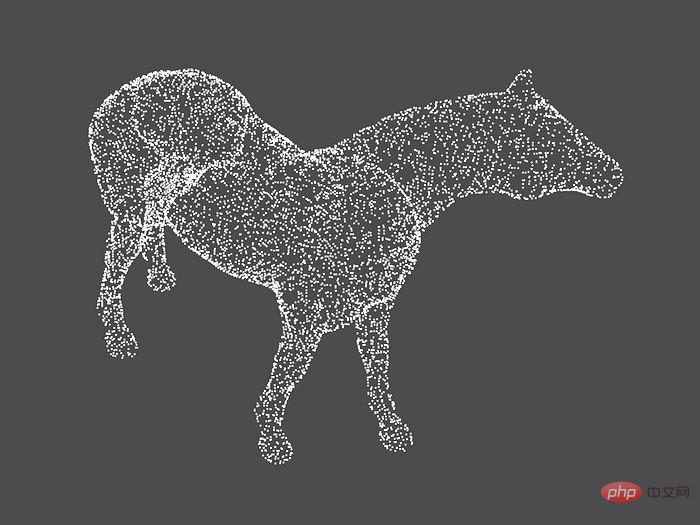
点云是具有 3 轴坐标(x, y, z)的点的集合。这种类型的集合可以来自不同的来源并以不同的格式保存。可以使用称为表面重建算法的不同算法将点云转换为 3D 网格。为了执行表面重建,本指南使用PyVista,这是一个易于使用的库来处理 3D 数据。 要从 PyPI 安装最新版本的 PyVista,请使用: 生成网格的代码非常短。你只需要提供一个N × 3形状的 NumPy 数组,其中N是点的数量,三列是每个点的x位置、y位置和z位置。该过程中最具挑战性的部分是获取感兴趣对象的点云,因为一旦有了它,生成网格的完整代码就非常短: 在此示例中,点云是从以下格式的 CSV 文件中提取的: 不管你的观点来自哪里,重要的是pv.PolyData(points)按照上面提到的格式向方法传递一个 NumPy 数组。 如果你想可视化点云使用: Eye Dome 照明是一种着色技术,可在可视化点云时改善深度感知。 点云可视化的示例。来自PyVista 示例的源文件。 如果您想可视化生成的网格,请使用: 网格可视化的示例。来自PyVista 示例的源文件。 以上就是怎么使用Python点云生成3D网格的详细内容,更多请关注Gxl网其它相关文章!1、介绍
pip install pyvistaa
2、程序
import numpy as npimport pyvista as pv# NumPy array with shape (n_points, 3)points = np.genfromtxt('points.csv', delimiter=",", dtype=np.float32)point_cloud = pv.PolyData(points)mesh = point_cloud.reconstruct_surface()mesh.save('mesh.stl')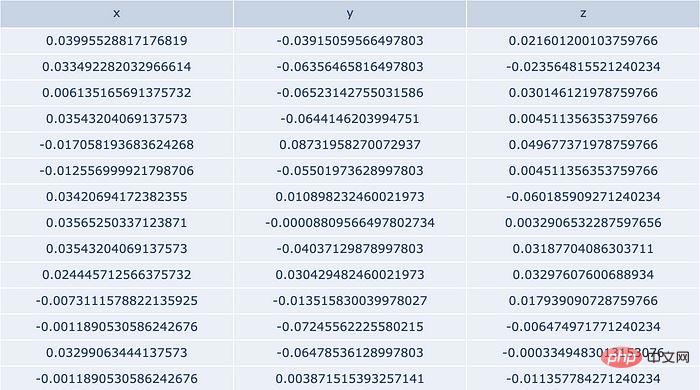
point_cloud.plot(eye_dome_lighting= True )
mesh.plot(color='orange')













热门排行
今日推荐






热门手游
-
商场购物模拟器官方版

版本:v1.0.9
大小:46.11MB
日期:2024-12-16
-
滚动方块大冒险免费版

版本:v1.0.5
大小:26.10MB
日期:2024-12-16
-
恋恋奇缘体验服版

版本:v1.0.0
大小:131.33MB
日期:2024-12-16
-
炉石传说官方正版

版本:v1.0
大小:100.52MB
日期:2024-12-16
-
人群大师免费版

版本:v2.15.0
大小:57.68MB
日期:2024-12-16
-
方鸡跳跑单机版

版本:v1
大小:63.49MB
日期:2024-12-16